Special Relativity with Geometric Algebra - Geometric Algebra Review
Ordinary 3D Geometric Algebra
Let's review a couple of properties of ordinary 3D Geometric Algebra. If you are not yet familiar with it there are a few excellent videos on YouTube as well as a couple of books going into GA in more detail. A few were mentioned in the previous section.
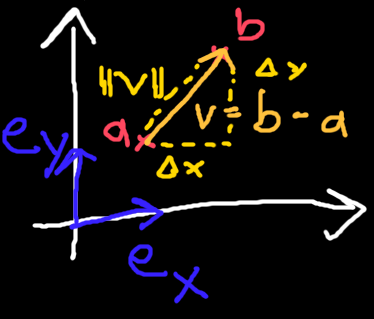
We have three orthonormal basis vectors
The position vectors
We can form the difference vector
To get the length squared
Active and Passive Transformations
You might not have heard the terms active and passive transformations before, but it is often a useful distinction to make. We will review these two types of transformations now too.
Active Transformations
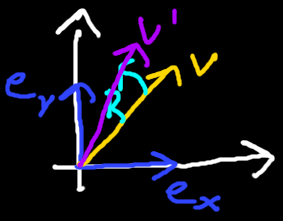
Active transformations change objects. The active transformations we are interested in here are those with rotors. In ordinary 3D GA we have three basis blades
The rotor is then applied to an object, such as our vector
The resulting vector
Rotating a vector does not change its length (verify this as an excercise if you wish by squaring the rotated vector), so applying rotors preserves distances.
Passive Transformations
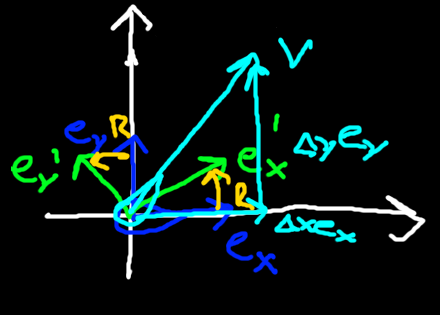
Passive transformations act on the coordinate basis vectors. They do not actually change the objects, only the perspective on them. They are also called change of basis. We are interested in passive transformations performed by rotors.
Let's say our first set of basis vectors
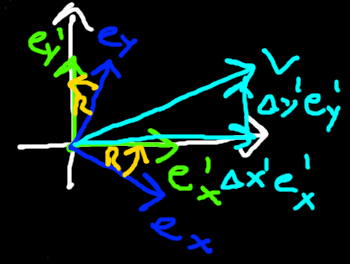
We can now see how the second person views the world by drawing the coordinate system using their basis vectors. The vector
As the vector did not actually change, its length when expressed in the new basis is still be the same as before too.
Another important property of passive transformations with rotors is that they keep the basis vectors orthonormal.
Important note: In this series we will only be dealing with orthonormal bases to simplify things. This excludes coordinate system such as spherical coordinates. In order to deal with more general bases a concept called reciprocal frames is required. Overall this is not a big change to make however, and it would be easy to adjust all our upcoming results to use them.
Conclusion
We shortly reviewed position and difference vectors. We looked at active transformations which change objects, in particular active transformations with rotors which perserve lengths. We also looked at passive transformations which only affect coordinate basis vectors but do not actually affect any objects. For these we also noticed that the length of vectors can obtained using the coefficients of the vector in the transformed basis. Furthermore passive transformations with rotors keep orthonormal bases orthonormal.
Formulas
- Orthonormal basis for ordinary GA:
- Vector expressed in basis:
- Vector length squared:
- Active transformation with rotor:
- Passive transformation with rotor:
Up next
Next we will look at how we can describe Spacetime with Geometric Algebra motivated by a thought experiment.