Special Relativity with Geometric Algebra - Time Dilation
Measuring a time difference
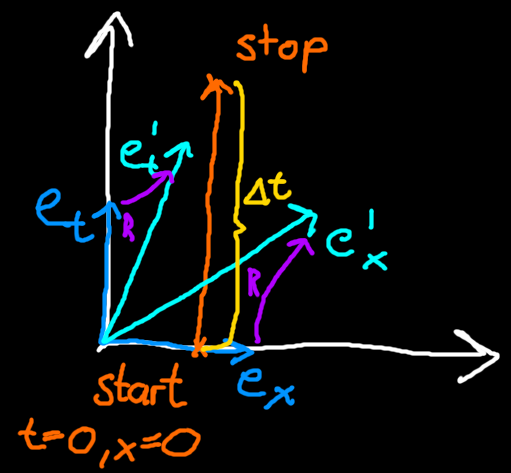
Alice is standing still with a stopwatch at x coordinate
Alice can measure the stop event components using her reciprocal basis vector:
So far so good, nothing unexpected has happened. Now we have Bob who is moving with constant speed along the x direction.Bob's basis vectors, indicated with a prime, are obtained by applying a rotor
Bob then looks at Alice start and stop her stopwatch. To figure out when and where the stop event happens for Bob, he uses his reciprocal basis vectors and takes the inner product with the stop event. Because Bob performed a passive transformation, we expect that he will measure different components than Alice, but we know that the thing being measured did not actually change.
For the time component Bob measures the following
Because
We can now also look at w here Bob will see the stop event happen. We will call the x coordinate of the stop event as seen by Bob
In Bob's view, the stop event happens in the negative x direction. This makes intuitive sense because Bob is moving in the positive x direction, so of course he will have left the "stationary" stop event behind him in the opposite direction. Importantly though, the offset we arrived at here is still not just the non-relativistic offset of
Numeric example
Let's plug in some example values, for
For comparison, just using
Gamma factor
We can rearrange
In ordinary Special Relativity the ratio we arrived is called the Gamma factor or Lorentz factor
The gamma factor is
Conclusion
First we saw that we can change between reference frames (ie. basis vectors of different observers) using rotors. Then we looked at a length in a rest frame and at how the length is seen by an observer moving relative to it. We noticed for length measurements it is important to measure both endpoints at the same time in the measurer's frame. The length ratio we arrived at was the Gamma factor which varies between
Formulas
- Gamma factor for observer moving with velocity
- Time dilation for observer moving with relative velocity
Up next
Next we will look at how a moving observer sees lengths change.